
3D Point Clouds ProcessingParticipants: Quan Líu, Yunsong Zhou, Zhenxi Wang and Hongzi ZhuSponsors: LION |
|
|
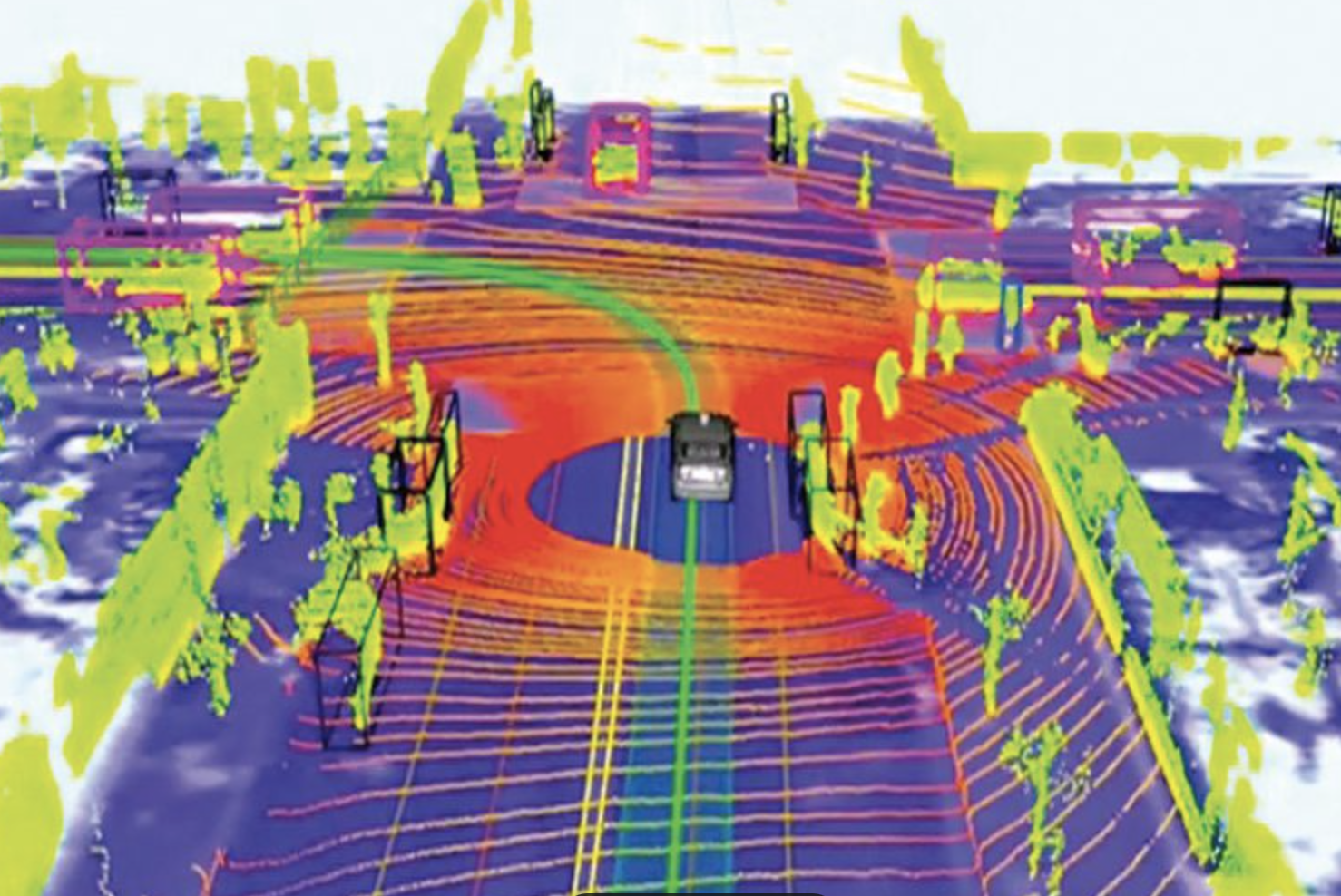
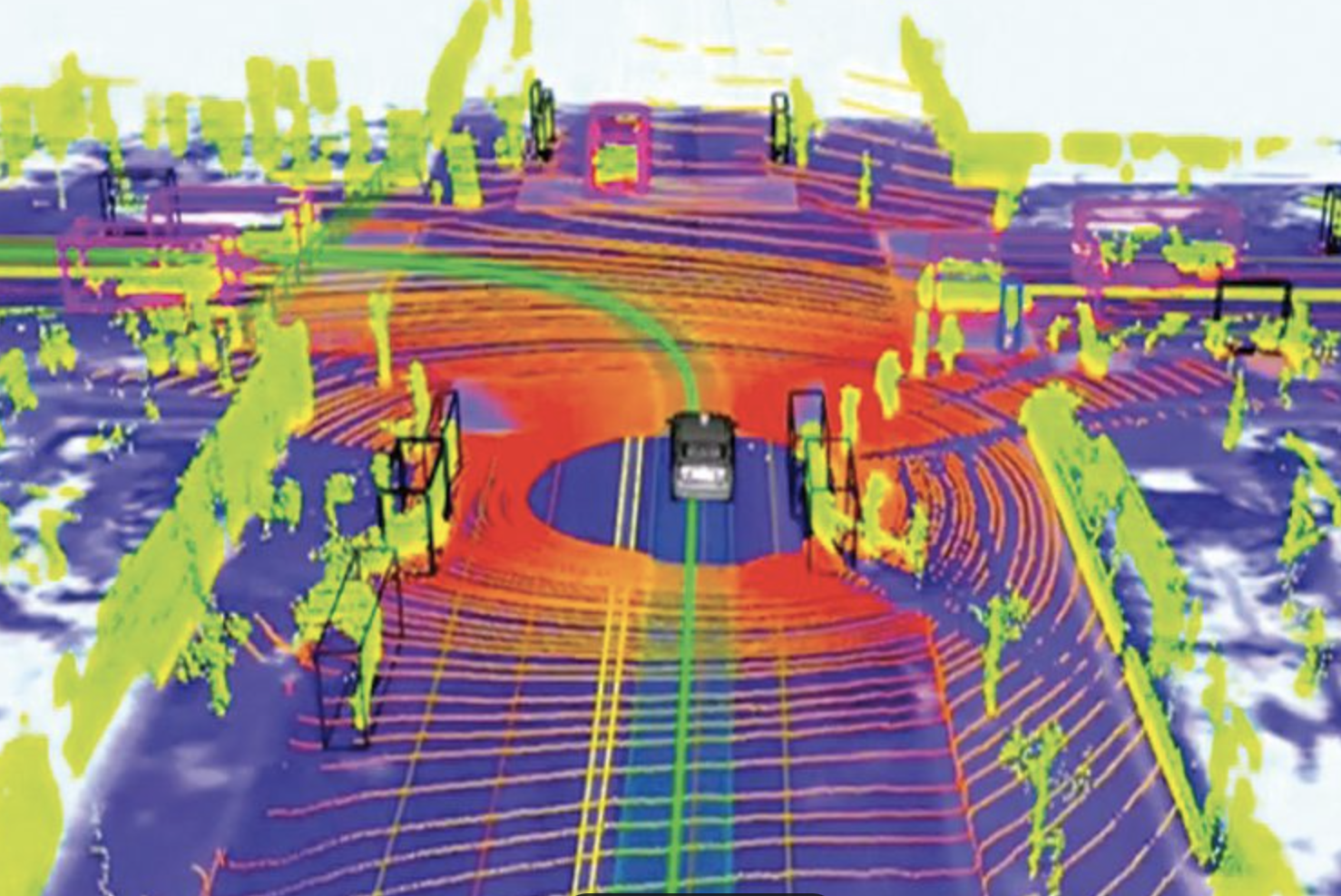
We are particularly interested in heterogeneous 3D point clouds data collected from neighboring vehicles through V2V communication. Such heterogeneous 3D point clouds, if well aligned, can extend the sensing range as well as enrich the sparse point cloud of one single LiDAR, benefiting down streaming applications.
|
|
Yunsong Zhou, Hongzi Zhu, Chunqin Li, Tiankai Cui, Shan Chang and Minyi Guo
in Proceedings of IEEE/CVF ICCV 2021, Virtual Conference.
|
|
Quan Liu, Yunsong Zhou, Hongzi Zhu, Shan Chang and Minyi Guo
in Proceedings of IJCAI 2023, Macao, China.
|
|
Quan Liu, Hongzi Zhu, Yunsong Zhou, Hongyang Li, Shan Chang and Minyi Guo
in Proceedings of IEEE/CVF ICCV 2023, Paris, France.
|
|
Zhenxi Wang, Hongzi Zhu, Yunxiang Cai, Quan Liu, Shan Chang and Liang Zhang
in Proceedings of IEEE INFOCOM 2024, Vancouver, Canada.
|
|
Quan Liu, Hongzi Zhu, Zhenxi Wang, Yunsong Zhou, Shan Chang and Minyi Guo
in Proceedings of IEEE/CVF CVPR 2024, Seattle, USA.
|
{kind=link}
{kind=link}