
Lane Localization with Monocular CameraParticipants: Yibo Han, Tiankai Cui, Shifan Zhang and Hongzi ZhuSponsors: LION |
|
|
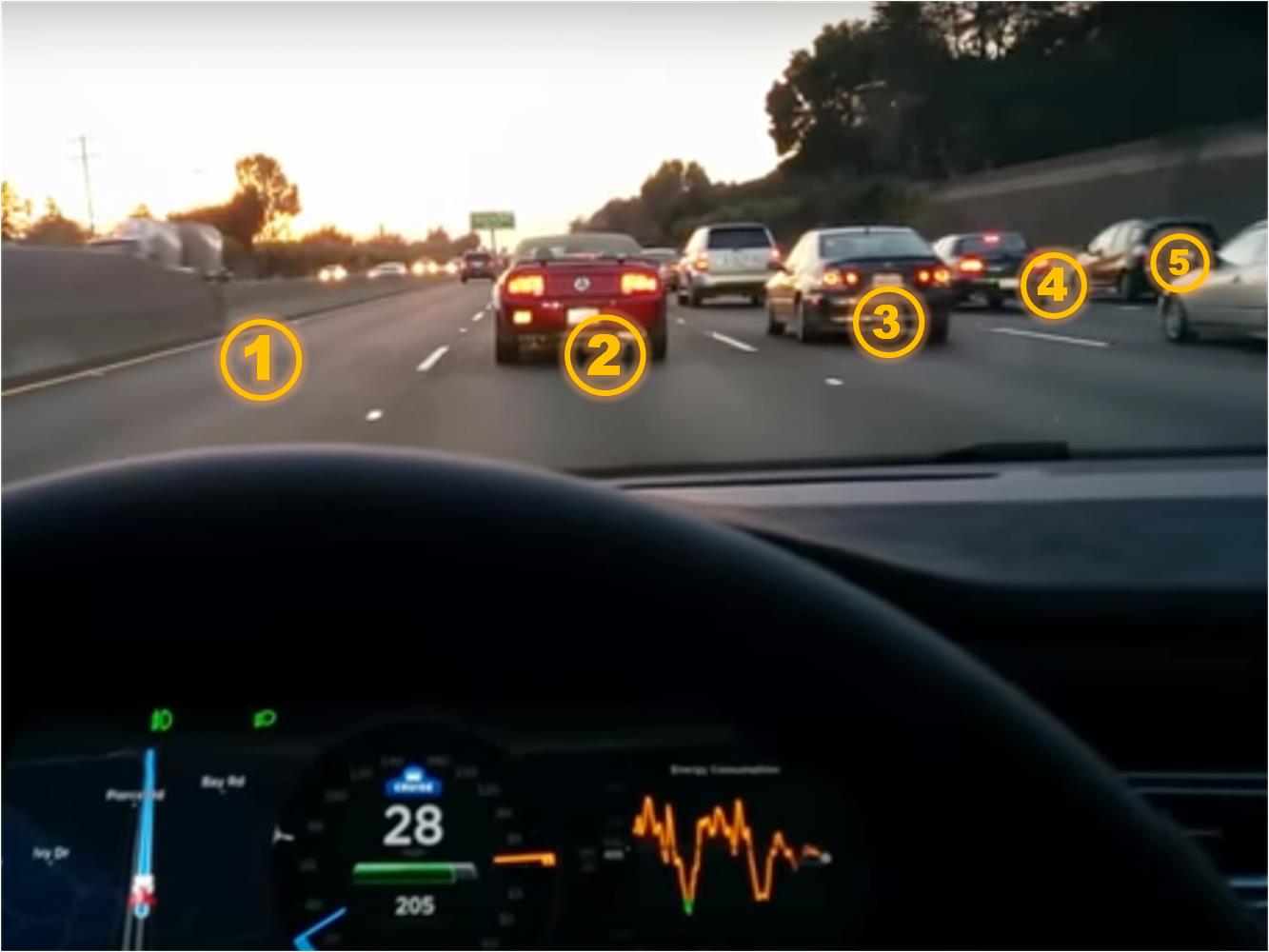
In this research initiative, we investigate lane-level localization of a vehicle based on computer vision. The main challenge is how to deal with dynamic trasnportation traffic and faint lane marks.
|
|
The ability to localize in lane level has significant sense, especially in the circumstance that resources for vehicular network is limited. Network resources may be allocated to different lanes, if a vehicle can detected on which lane it drives. Among all sensors, cameras are the most popular and economical sensors deployed on vehicle. Thus, we seek to build algorithms and systems to realize lane-level localization.
|
|