
POLO: Localizing RFID-Tagged Objects for Mobile RobotsDianhan Xie, Xudong Wang, Aimin Tang and Hongzi Zhuin the Proceedings of INFOCOM 2021, Virtual Conference. |
|
|
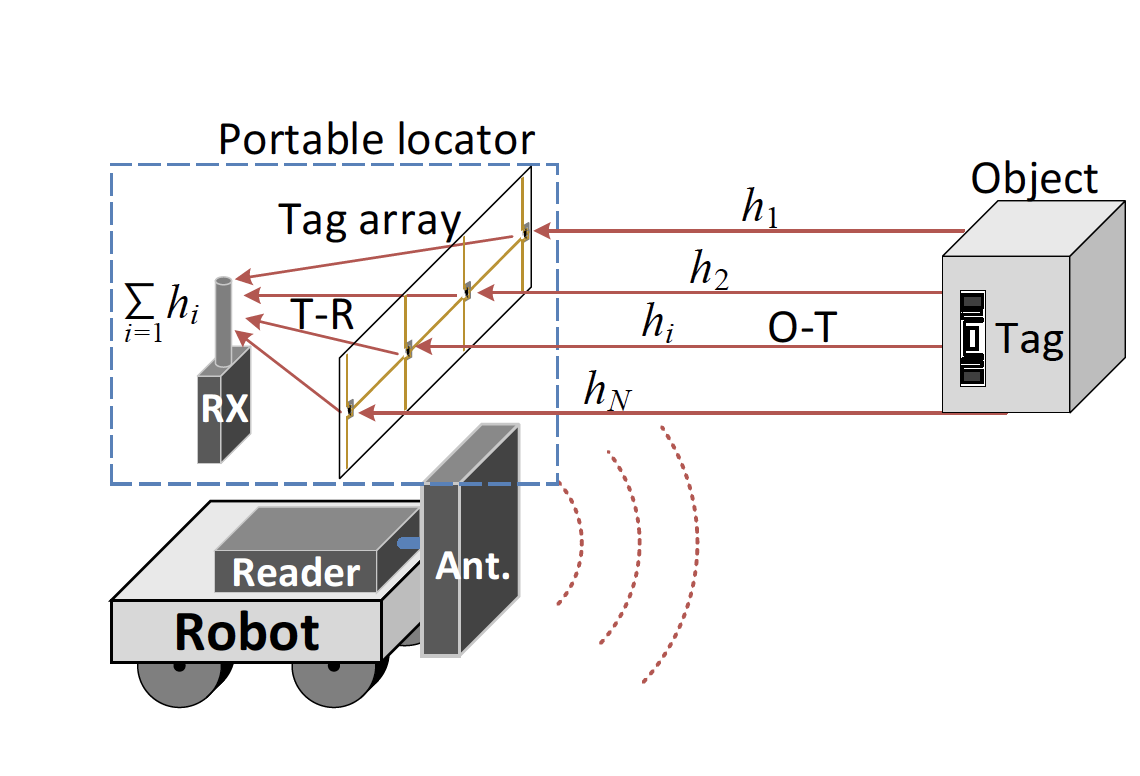
In many Internet-of-Things (IoT) applications, various RFID-tagged objects need to be localized by mobile robots. Existing RFID localization systems are infeasible, since they either demand bulky RFID infrastructures or cannot achieve sufficient localization accuracy. In this paper, a portable localization (POLO) system is developed for a mobile robot to locate RFID-tagged objects. Besides a single RFID reader on board, POLO is distinguished with a tag array and a lightweight receiver. The tag array is designed to reflect the RFID signal from an object into multi-path signals. The receiver captures such signals and estimates their multi-path channel coefficients by a tag-array-assisted channel estimation (TCE) mechanism. Such channel coefficients are further exploited to determine the object's direction by a spatial smoothing direction estimation (SSDE) algorithm. Based on the object's direction, POLO guides the robot to approach the object. When the object is in proximity, its 2D location is finally determined by a near-range positioning (NRP) algorithm. POLO is prototyped and evaluated via extensive experiments. Results show that the average angular error is within 1.6 degrees when the object is in the far-range (2~6 m), and the average location error is within 5 cm while the object is in the near-range (~1 m).
|