
MonoEF: Extrinsic Parameter Free Monocular 3D Object DetectionYunsong Zhou, Yuan He, Hongzi Zhu, Cheng Wang, Hongyang Li and Qinhong JiangIEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 44(12), pp. 10114-10128, 2022. |
|
|
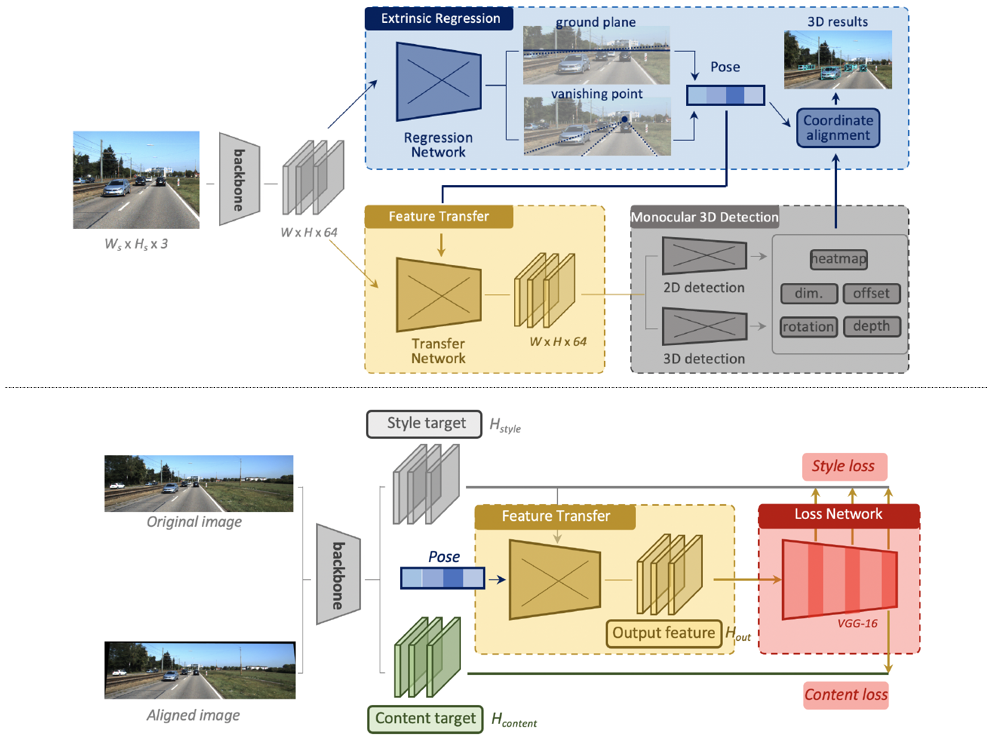
Monocular 3D object detection is an important task in autonomous driving. It can be easily intractable where there exists ego-car pose change w.r.t. ground plane. This is common due to the slight fluctuation of road smoothness and slope. Due to the lack of insight in industrial application, existing methods on open datasets neglect the camera pose information, which inevitably results in the detector being susceptible to camera extrinsic parameters. The perturbation of objects is very popular in most autonomous driving cases for industrial products. To this end, we propose a novel method to capture camera pose to formulate the detector free from extrinsic perturbation. Specifically, the proposed framework predicts camera extrinsic parameters by detecting vanishing point and horizon change. A converter is designed to rectify perturbative features in the latent space. By doing so, our 3D detector works independent of the extrinsic parameter variations and produces accurate results in realistic cases, e.g., potholed and uneven roads, where almost all existing monocular detectors fail to handle. Experiments demonstrate our method yields the best performance compared with the other state-of-the-arts by a large margin on both KITTI 3D and nuScenes datasets.
|