VENUS: VEhicular Network Universal SimulatorParticipants: Hongzi Zhu, Jiangang Shen, Yunxiang Cai, Yasheng WangSponsors: LION |
|
|
Microscope traffic and VANET simulator
|
|
Introduction:
VENUS (VEhicular Network Universal Simulator) is a microscope traffic and VANET simulator and consist of three main components:
maptuner: generate electronic map which can be visualized and used for traffic
mapviewer: visualization of electronic map, generate and visualize traffic flow
trace_generate: generate vehicle traces without visualization
Here is source code: link Here is detailed document: We will introduce VENUS in three part: 1. Data Structure 2. File Organization 3. Usage
Part I: Data Structure: 1. Basic Data Structure: Struct Item stores the information of a pointer to any data type:
struct Item
{
void *datap;
struct Item *prev;
struct Item *next;
};
Struct Duallist organizes several items to a bi-directional linked list:
struct Duallist
{
struct Item *head;
unsigned long nItems;
};
The relationship between Struct Item and Struct Duallist can be shown with the figure below:
Structure of Duallist
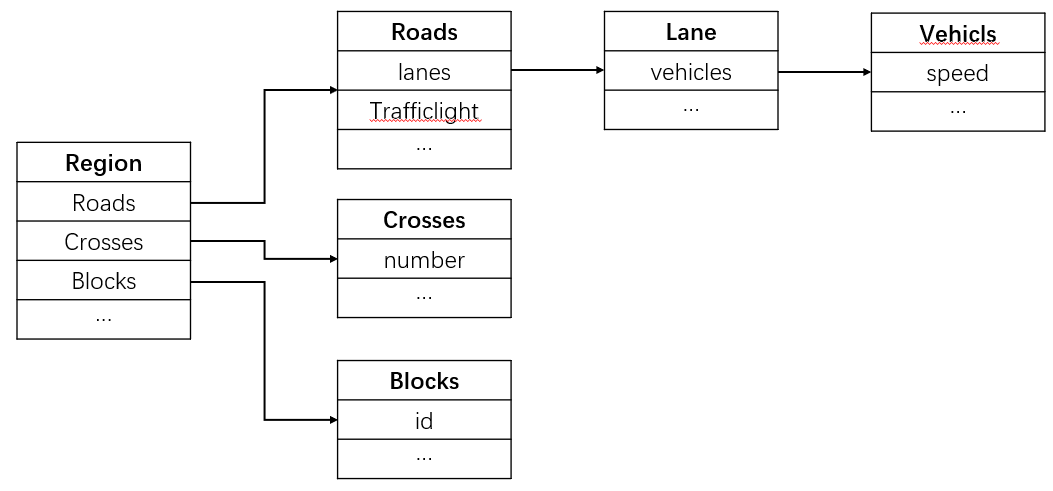
2. Simulation Data Structure: Organization of simulation data structure used in VENUS is shown in the figure below:
Organization of Simulation Data Structure
Struct Region stores information about the whole map, e.g., road, district, river, cross, etc. Main content of Struct Region is shown below:
struct Region
{
struct Polygon *chosen_polygon; //polygon which describes the contour
struct Duallist blocks; //dual-list which stores all blocks
struct Duallist roads; //dual-list which stores all roads
int roadNums; //total number of roads
struct Duallist crosses; //dual-list which stores all crosses
int crossNums; //total number of crosses
struct Duallist districts; //dual-list which stores all districts
struct Duallist rivers; //dual-list which stores all rivers
};
Struct Road stores the information of a specific road, e.g., points which consist the road, road length, lanes on road, traffic light on road, etc. Main content of Struct Road is shown below:
struct Road
{
int id; //road ID
struct Duallist origPoints; //origin data points of the road
struct Duallist points; //real data points of the road
struct Duallist waittingV; //vehicles waiting for generated on the road;
double length; //road length
int headEndAngle; //start angle of road
int tailEndAngle; //end angle of road
struct Cross *headEnd; //start cross of road
struct Cross *tailEnd; //end cross of road
struct Duallist lanes; //lanes on road
struct Duallist lane_lines; //data points of lanes
struct Trafficlight lights[3]; //traffic lights on road (turn left, forward, right)
};
Struct Lane stores the information of a specific lane on the road. The main content of Struct Lane is shown below:
struct Lane
{
struct Duallist vehicles; //vehicles on this lane
struct Duallist Points; //data points of this lane
struct Duallist crossLanes; //data structure connecting lane and other roads
char type; //first lane on road or not
struct Road *onRoad; //pointer to the road which this lane is located on
};
Struct Cross stores the information of a specific cross. The main content of Struct Cross is shown below:
struct Cross
{
int number; //cross id
struct Point gPoint; //coordinate of cross
struct Duallist inRoads; //roads which come in to the cross
struct Duallist outRoads; //roads which come out of the cross
};
Struct Vehicle stores the information of a specific vehicle. The main content of Struct Vehicles is shown below:
struct Vehicle
{
int id; // vehicle ID
double position; // distance to the start of road
double v; // speed
double vmax; // maximum speed
double a; // acceleration
double b; // deceleration
double x; // x coordinate
double y; // y coordinate
struct Lane *belongLane; // pointer to the lane which the vehicle is on
struct Path *pathInfo; // all roads from the start to the end of vehicle path
struct Item *currentRoadItem; // current road that vehicle is on
};
3. Trace Record Data Structure:
Struct Report stores the information of a specific vehicle at one timestamp:
struct Report
{
time_t timestamp; //current timestamp
struct Point gPoint; //coordinate of the vehicle
short speed; //vehicle speed
short angle; //vehicle angle
char state; //vehicle type
struct Trace* fromTrace; //pointer to the trace which this report is on
};
Struct Trace stores a series of report, i.e, the trace of a specific vehicle:
struct Trace
{
char vName[NAME_LENGTH]; //vehicle name/id
struct Duallist reports; //dual-list of vehicle report
union Int_RGBO color; //color of trace
double oldx, oldy, oldangle; //coordinate and angle of previous report
int finished; //whether vehicle finishes its path
};
Struct Hashtable stores all the traces of the simulation:
struct Hashtable
{
struct Item **head; //entrance of hash table
unsigned long size; //size of hash table (number of row)
unsigned long entries; //size of filled row
unsigned long count; //number of data
unsigned long (*hash_func)(void *); //Hash function
int(*equal_func)(void*, void*); //compare function
};
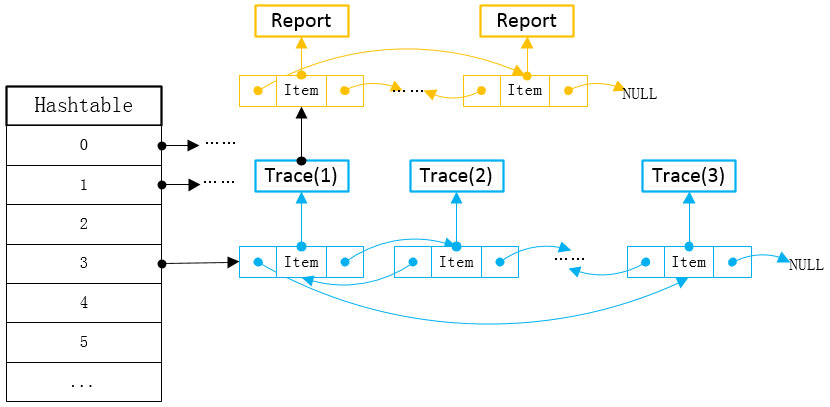
The structure of Hash table is shown in the figure below:
Structure of Hash Table
Part II: File Organization: Basic structure and function of source code: Most important code files are located in ./common, ./geometry, ./GUI, ./trace these four folders. ./common: Realization of basic data structures like dual-list and hash-table, etc, and operations on these data structures like add and delete node from dual-list, etc. (common.h and common.c)
./geometry: Realization of basic struct used for map generation like Region, Road, River, Lane, Cross, etc,(geometry.h) and operations on these struct like generate or delete one Road/Region/Cross, etc. (geometry.c) Source code of maptuner also locate in this folder
./GUI: Realization of GUI (visualization of map and traffic flow) with GTK toolkit (gtk_cairo.h and gtk_cairo.c) and events trigger when click a button (start/stop traffic flow, upscale/downscale map, etc). (events.h and events.c) Source code of mapviewer also locate in this folder
./trace: Realization of traffic flow generation, struct of trace report/vehicles, etc, (trace.h) and operations on these structs like generate/delete one report (trace.c). One vehicle is set with a start cross and an end cross, a path between two cross is generated with a Shortest path finding algorithm. Krauss vehicle following model is utilized in VENUS and vehicles can automatically accelerate/decelerate/change lane due to different traffic situations. (mapsimulate.c) Source code of trace_generate also locate in this folder
Part III: VENUS Usage: Section I: maptuner 1. Usage: ./maptuner [-r "x1 y1 x2 y2 x3 y3..."] [-j scrapLength length] [-c cell size] [-s districts.shp rivers.shp roads.shp roads.txt | -m source.map] [-e editmap.txt] output.map -r: coordinate set of a polygon which is the contour of appointed area
-c: the whole map is divided into cells, -c can define the length of a cell (in meter)
-s: .shp file needed to consist a map, including districts.shp, rivers.shp and roads.shp, etc.
-m: output map file
Example1: generate electronic map of Shanghai from .shp file of Shanghai
make clean make maptuner ./maptuner -s ../maps/district.shp ../maps/river.shp ../maps/road.shp NULL shanghai.map then a map named shanghai.map will be generated and can be used for visualization/traffic flow generation.
Example2: generate electronic map of an appointed rectangular area in Shanghai from .shp file of Shanghai, with cell size=20m ./maptuner -r "121.172388 31.303633 121.181830 31.303633 121.181830 31.296782 121.172388 31.296782" -s ../maps/district.shp ../maps/river.shp ../maps/road.shp NULL shanghai.map -c 20 then a map named area1.map will be generated
2. Program Overview The workflow of maptuner is shown in the figure below:
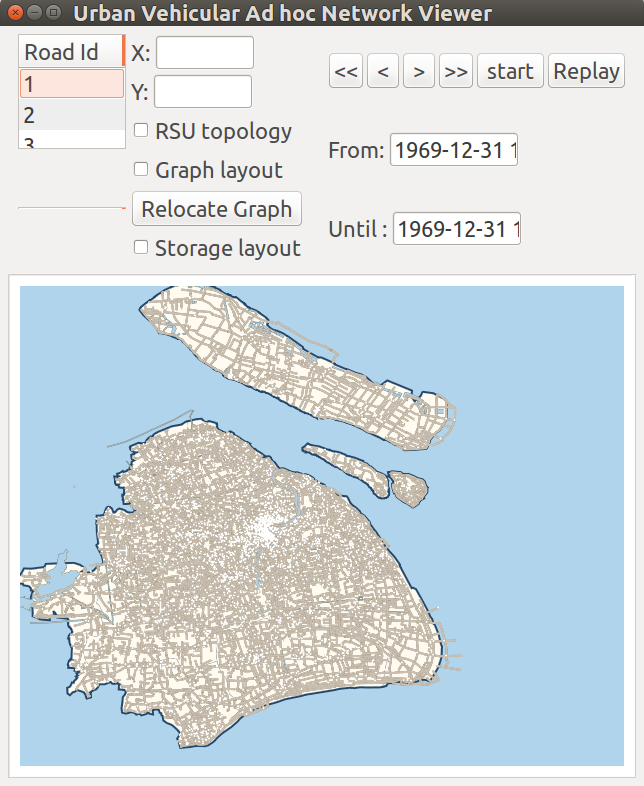
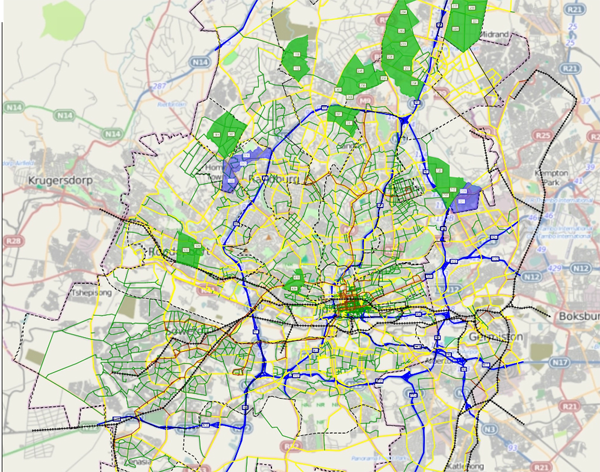
Section II:mapviewer: 1. Usage : ./mapviewer .map [-debug] [-c colormap] [-v .vmap] [-m contact_load_mode ] [-n contacts number] [-f contacts interval(hours)] [-g .edge .comm] [.lst .cont .ogd .mgd .dsp .bus ...] Example: generate traffic flow on shanghai.map and visualize it make clean make mapviewer ./mapviewer shanghai.map (conduct real time simulation? 1 or 0:) 1 (Please input the number of cars:) 2000 (Please input the simulation time(seconds):) 2000 First shanghai.map will be visualized.
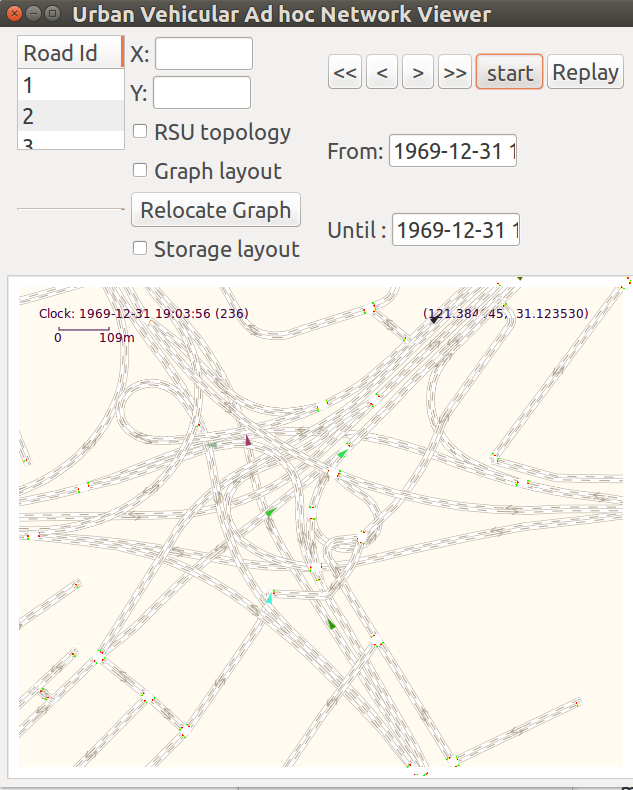
Visualization of Shanghai.map Then you can click the start button to start the visualization of traffic flow. You can click the start button once again to continue/pause the traffic flow. You can also click the map with left/right mouse button to upscale/downscale the map.
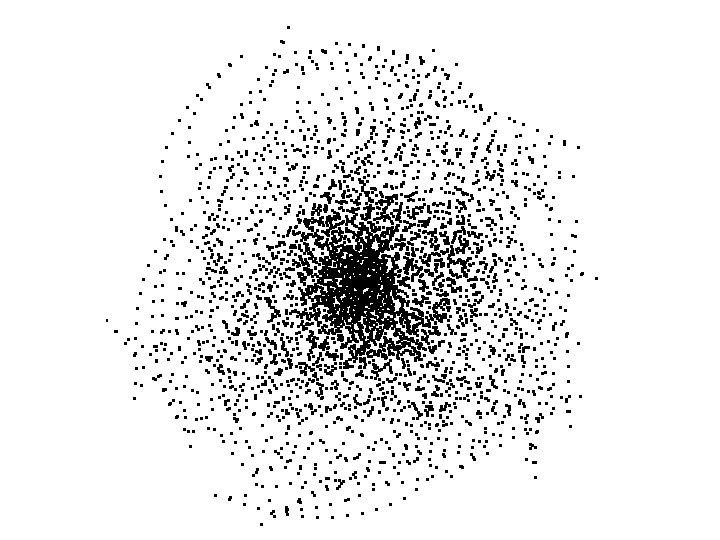
Visualization of traffic flow trace_generate: Usage: ./trace_generate .map output.mgd Example: generate and record vehicle traces on shanghai.map
make clean make trace_generate ./trace_generate shanghai.map trace.mgdtrace is recorded as the format below:
vehicle id, timestamp(second), longitude, latitude, speed(m/s), head angle, 0, current road id
Others: For more details about VENUS, please refer to the appended paper.
|
|
|
Hongzi Zhu, Yanmin Zhu, Minglu Li and Lionel M. Ni
in Proceedings of ICPP 2007, Xi'an, China.
|
|
Hongzi Zhu, Yanmin Zhu, Minglu Li and Lionel M. Ni
in Proceedings of IEEE INFOCOM 2008, Phoenix, USA.
|
|
Minglu Li, Hongzi Zhu, Yanmin Zhu and Lionel M. Ni
IEEE Transactions on Vehicular Technology (IEEE TVT), 58(8), pp. 4088-4097, Oct. 2009.
|
|
Hongzi Zhu, Minglu Li, Yanmin Zhu and Lionel M. Ni
IEEE Transactions on Parallel and Distributed Systems (IEEE TPDS), 20(5), pp. 740-752, May 2009.
|
|
Hongzi Zhu, Minglu Li, Luoyi Fu, Guangtao Xue, Yanmin Zhu and Lionel M. Ni
IEEE Transactions on Parallel and Distributed Systems (IEEE TPDS), 22(8), pp. 1258-1266, Aug. 2011.
|
|
Hongzi Zhu, Shan Chang, Minglu Li, Sagar Naik and Sherman Shen
in Proceedings of IEEE INFOCOM 2011, Shanghai, China.
|
|
Shan Chang, Yong Qi, Hongzi Zhu, Jizhong Zhao and Xuemin (Sherman) Shen
IEEE Transactions on Parallel and Distributed Systems (IEEE TPDS), 23(6), pp 1103 - 1114, June, 2012.
|
|
Hongzi Zhu, Mianxiong Dong, Shan Chang, Yanmin Zhu, Minglu Li and Sherman Shen
in Proceedings of IEEE INFOCOM 2013, Turin, Italy.
|
|
Jun Qin, Hongzi Zhu, Yanmin Zhu, Li Lu, Guangtao Xue and Minglu Li
in Proceedings of IEEE INFOCOM 2014, Toronto, Canada.
|
|
Shan Chang, Hongzi Zhu, Mianxiong Dong, Kaoru Ota, Xiaoqiang Liu and Sherman Shen
IEEE Transactions on Vehicular Technology (IEEE TVT),65(7), pp. 4900-4910, 2016.
|
|
Jun Qin, Hongzi Zhu, Yanmin Zhu, Li Lu, Guangtao Xue and Minglu Li
IEEE Transactions on Parallel and Distributed Systems (IEEE TPDS), 27(6), pp. 1770-1782, 2016.
|
|
Feng Lv, Hongzi Zhu, Haibo Zhou, Wenchao Xu, Ning Zhang, Minglu Li and Xuemin (Sherman) Shen
IEEE Transactions on Vehicular Technology (IEEE TVT), 67(4), pp. 3586 - 3597, 2018.
|
|
Feng Lyu, Hongzi Zhu, Nan Cheng, Yanmin Zhu, Haibo Zhou, Wenchao Xu, Guangtao Xue and Minglu Li
in Proceedings of IEEE SECON 2018, Hong Kong, China.
|
|
Feng Lyu, Hongzi Zhu, Haibo Zhou, Liping Qian, Wenchao Xu, Minglu Li and Xuemin (Sherman) Shen
IEEE Transactions on Vehicular Technology, 67(11), pp. 10590-10602, 2018.
|
|
Yunxiang Cai, Hongzi Zhu, Xiao Wang, Shan Chang, Jiangang Shen and Minyi Guo
in Proceedings of IEEE INFOCOM 2021, Virtual Conference.
|

|
Yunxiang Cai, Hongzi Zhu, Shan Chang, Xiao Wang, Jiangang Shen and Minyi Guo
IEEE/ACM Transactions on Networking (TON), 30(4), pp. 1703-1716, 2022.
|
|
Jiangang Shen, Hongzi Zhu, Yunxiang Cai, Bangzhao Zhai, Xudong Wang, Shan Chang, Haibin Cai and Minyi Guo
in Proceedings of IEEE ICDCS 2022, Bologna, Italy.
|